Notebook source code:
examples/regulator/regulator.ipynb
Run the notebook yourself on binder
![]()
A simple regulator problem¶
We illustrate here the coupling of direct and indirect methods in optimal control, on a simple case of Linear Quadratic Regulator in dimension 2. More precisely, we show how the direct method can provide the relevant information to initialize the indirect method accurately, namely with the correct control structure and with an estimate of junction times as well as state and costate values at the relevant times. We study the following problem, for which the optimal control structure consists in a Bang arc followed by a Singular arc.
Packages
[1]:
import bocop
import matplotlib.pyplot as plt
import nutopy as nt
import numpy as np
plt.rcParams['figure.dpi'] = 180
plt.rcParams.update({"text.usetex":True})
%matplotlib inline
Parameters
[2]:
t0 = 0.
tf = 5.
x0 = np.array([0., 1.])
Direct method¶
We first solve the problem with the so-called direct transcription approach, that basically consists in solving the finite-dimensional nonlinear programming problem (NLP) resulting from applying a time discretization to the original optimal control problem (OCP). We reformulate the Lagrange cost as a Mayer cost by introducing a new state variable
and use the software Bocop for the numerical simulations. The definition of the problem consists in one C++ file for the problem functions, and one text file for all other parameters and settings. The file problem.cpp defines the final cost, dynamics and boundary conditions for the OCP.
[3]:
!pygmentize problem.cpp
#include <OCP.h>
template <typename Variable>
inline void OCP::finalCost(double initial_time, double final_time, const Variable *initial_state, const Variable *final_state, const Variable *parameters, const double *constants, Variable &final_cost)
{
final_cost = final_state[2];
}
template <typename Variable>
inline void OCP::dynamics(double time, const Variable *state, const Variable *control, const Variable *parameters, const double *constants, Variable *state_dynamics)
{
Variable x1 = state[0];
Variable x2 = state[1];
Variable u = control[0];
state_dynamics[0] = x2;
state_dynamics[1] = u;
state_dynamics[2] = 0.5*(x1*x1+x2*x2);
}
template <typename Variable>
inline void OCP::boundaryConditions(double initial_time, double final_time, const Variable *initial_state, const Variable *final_state, const Variable *parameters, const double *constants, Variable *boundary_conditions)
{
boundary_conditions[0] = initial_state[0];
boundary_conditions[1] = initial_state[1];
boundary_conditions[2] = initial_state[2];
}
template <typename Variable>
inline void OCP::pathConstraints(double time, const Variable *state, const Variable *control, const Variable *parameters, const double *constants, Variable *path_constraints)
{
}
void OCP::preProcessing()
{}
// ///////////////////////////////////////////////////////////////////
// explicit template instanciation for template functions, with double and double_ad
template void OCP::finalCost<double>(double initial_time, double final_time, const double *initial_state, const double *final_state, const double *parameters, const double *constants, double &final_cost);
template void OCP::dynamics<double>(double time, const double *state, const double *control, const double *parameters, const double *constants, double *state_dynamics);
template void OCP::boundaryConditions<double>(double initial_time, double final_time, const double *initial_state, const double *final_state, const double *parameters, const double *constants, double *boundary_conditions);
template void OCP::pathConstraints<double>(double time, const double *state, const double *control, const double *parameters, const double *constants, double *path_constraints);
template void OCP::finalCost<double_ad>(double initial_time, double final_time, const double_ad *initial_state, const double_ad *final_state, const double_ad *parameters, const double *constants, double_ad &final_cost);
template void OCP::dynamics<double_ad>(double time, const double_ad *state, const double_ad *control, const double_ad *parameters, const double *constants, double_ad *state_dynamics);
template void OCP::boundaryConditions<double_ad>(double initial_time, double final_time, const double_ad *initial_state, const double_ad *final_state, const double_ad *parameters, const double *constants, double_ad *boundary_conditions);
template void OCP::pathConstraints<double_ad>(double time, const double_ad *state, const double_ad *control, const double_ad *parameters, const double *constants, double_ad *path_constraints);
The file problem.def contains all other relevant information, such as problem dimensions, time discretization choices, bounds for the different variables and constraints, initial guess and numerical settings for the NLP solver Ipopt, etc
[4]:
!pygmentize problem.def
# Definition file
# Dimensions
dim.state 3
dim.control 1
dim.boundaryconditions 3
dim.pathconstraints 0
dim.parameters 0
dim.constants 0
# Time interval
initial.time 0
final.time 5
# Constants
# Time discretisation
time.steps 1000
ode.discretization midpoint_implicit
# Bounds for constraints
boundarycond.0.lowerbound 0
boundarycond.0.upperbound 0
boundarycond.1.lowerbound 1
boundarycond.1.upperbound 1
boundarycond.2.lowerbound 0
boundarycond.2.upperbound 0
# Bounds for variables
control.0.lowerbound -1
control.0.upperbound 1
# Initialization for discretized problem
state.0.init 0.1
state.1.init 0.1
state.2.init 0.1
control.0.init 0.1
# Names
# Ipopt
ipoptIntOption.print_level 5
ipoptIntOption.max_iter 1000
ipoptStrOption.mu_strategy adaptive
ipoptNumOption.tol 1e-12
# Misc
ad.retape 0
We build the problem executable. This step has to be performed only once (unless the C++ file defining the dynamics is modified).
[5]:
problem_path = "." # using local problem definition
# Uncomment to build the problem
bocop.build(problem_path, cmake_options = '-DCMAKE_CXX_COMPILER=g++')
[EXEC] > ['cmake -DCMAKE_BUILD_TYPE=Debug -DPROBLEM_DIR=/Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator -DCPP_FILE=problem.cpp -DCMAKE_CXX_COMPILER=g++ /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop']
> -- The C compiler identification is Clang 14.0.4
> -- The CXX compiler identification is AppleClang 13.0.0.13000029
> -- Detecting C compiler ABI info
> -- Detecting C compiler ABI info - done
> -- Check for working C compiler: /Users/ocots/opt/miniconda3/envs/gallery/bin/x86_64-apple-darwin13.4.0-clang - skipped
> -- Detecting C compile features
> -- Detecting C compile features - done
> -- Detecting CXX compiler ABI info
> -- Detecting CXX compiler ABI info - done
> -- Check for working CXX compiler: /usr/bin/g++ - skipped
> -- Detecting CXX compile features
> -- Detecting CXX compile features - done
> -- Problem path: /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator
> -- Using CPPAD found at /Users/ocots/opt/miniconda3/envs/gallery/include/cppad/..
> -- Using IPOPT found at /Users/ocots/opt/miniconda3/envs/gallery/lib/libipopt.dylib
> -- Found Python3: /Users/ocots/opt/miniconda3/envs/gallery/bin/python3.7 (found version "3.7.12") found components: Interpreter Development Development.Module Development.Embed
> -- Found SWIG: /Users/ocots/opt/miniconda3/envs/gallery/bin/swig (found suitable version "4.0.2", minimum required is "4")
> -- Build type: Debug
> -- Configuring done
> -- Generating done
> -- Build files have been written to: /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/build
[DONE] > ['cmake -DCMAKE_BUILD_TYPE=Debug -DPROBLEM_DIR=/Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator -DCPP_FILE=problem.cpp -DCMAKE_CXX_COMPILER=g++ /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop']
[EXEC] > make
> [ 3%] Building CXX object src/CMakeFiles/bocop.dir/AD/dOCPCppAD.cpp.o
> [ 7%] Building CXX object src/CMakeFiles/bocop.dir/DOCP/dOCP.cpp.o
> [ 10%] Building CXX object src/CMakeFiles/bocop.dir/DOCP/dODE.cpp.o
> [ 14%] Building CXX object src/CMakeFiles/bocop.dir/DOCP/dControl.cpp.o
> [ 17%] Building CXX object src/CMakeFiles/bocop.dir/DOCP/dState.cpp.o
> [ 21%] Building CXX object src/CMakeFiles/bocop.dir/DOCP/solution.cpp.o
> [ 25%] Building CXX object src/CMakeFiles/bocop.dir/NLP/NLPSolverIpopt.cpp.o
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/NLP/NLPSolverIpopt.cpp:38:8: warning: 'finalize_solution' overrides a member function but is not marked 'override' [-Winconsistent-missing-override]
> void finalize_solution(Ipopt::SolverReturn status, Ipopt::Index n, const Ipopt::Number* x, const Ipopt::Number* z_L, const Ipopt::Number* z_U, Ipopt::Index m, const Ipopt::Number* g,
> ^
> /Users/ocots/opt/miniconda3/envs/gallery/include/coin/IpTNLP.hpp:534:17: note: overridden virtual function is here
> virtual void finalize_solution(
> ^
> 1 warning generated.
> [ 28%] Building CXX object src/CMakeFiles/bocop.dir/OCP/OCP.cpp.o
> [ 32%] Building CXX object src/CMakeFiles/bocop.dir/tools/tools.cpp.o
> [ 35%] Building CXX object src/CMakeFiles/bocop.dir/tools/tools_interpolation.cpp.o
> [ 39%] Building CXX object src/CMakeFiles/bocop.dir/Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/problem.cpp.o
> [ 42%] Linking CXX shared library /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/libbocop.dylib
> ld: warning: -pie being ignored. It is only used when linking a main executable
> [ 42%] Built target bocop
> Scanning dependencies of target bocopwrapper_swig_compilation
> [ 46%] Swig compile /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/bocopwrapper.i for python
> Language subdirectory: python
> Search paths:
> ./
> /Users/ocots/opt/miniconda3/envs/gallery/include/python3.7m/
> AD/
> DOCP/
> NLP/
> OCP/
> tools/
> /Users/ocots/opt/miniconda3/envs/gallery/include/cppad/../
> /Users/ocots/opt/miniconda3/envs/gallery/include/coin/
> /Users/ocots/opt/miniconda3/envs/gallery/include/python3.7m/
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/AD/
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/DOCP/
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/NLP/
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/OCP/
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/tools/
> ./swig_lib/python/
> /Users/ocots/opt/miniconda3/envs/gallery/share/swig/4.0.2/python/
> ./swig_lib/
> /Users/ocots/opt/miniconda3/envs/gallery/share/swig/4.0.2/
> Preprocessing...
> Starting language-specific parse...
> Processing types...
> C++ analysis...
> Processing nested classes...
> Generating wrappers...
> [ 46%] Built target bocopwrapper_swig_compilation
> [ 50%] Building CXX object src/CMakeFiles/bocopwrapper.dir/CMakeFiles/bocopwrapper.dir/bocopwrapperPYTHON_wrap.cxx.o
> [ 53%] Linking CXX shared module /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/_bocopwrapper.so
> ld: warning: -pie being ignored. It is only used when linking a main executable
> -- Moving python modules to /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator
> [ 53%] Built target bocopwrapper
> [ 57%] Building CXX object src/CMakeFiles/bocopApp.dir/AD/dOCPCppAD.cpp.o
> [ 60%] Building CXX object src/CMakeFiles/bocopApp.dir/DOCP/dOCP.cpp.o
> [ 64%] Building CXX object src/CMakeFiles/bocopApp.dir/DOCP/dODE.cpp.o
> [ 67%] Building CXX object src/CMakeFiles/bocopApp.dir/DOCP/dControl.cpp.o
> [ 71%] Building CXX object src/CMakeFiles/bocopApp.dir/DOCP/dState.cpp.o
> [ 75%] Building CXX object src/CMakeFiles/bocopApp.dir/DOCP/solution.cpp.o
> [ 78%] Building CXX object src/CMakeFiles/bocopApp.dir/NLP/NLPSolverIpopt.cpp.o
> /Users/ocots/opt/miniconda3/envs/gallery/lib/python3.7/site-packages/bocop/src/NLP/NLPSolverIpopt.cpp:38:8: warning: 'finalize_solution' overrides a member function but is not marked 'override' [-Winconsistent-missing-override]
> void finalize_solution(Ipopt::SolverReturn status, Ipopt::Index n, const Ipopt::Number* x, const Ipopt::Number* z_L, const Ipopt::Number* z_U, Ipopt::Index m, const Ipopt::Number* g,
> ^
> /Users/ocots/opt/miniconda3/envs/gallery/include/coin/IpTNLP.hpp:534:17: note: overridden virtual function is here
> virtual void finalize_solution(
> ^
> 1 warning generated.
> [ 82%] Building CXX object src/CMakeFiles/bocopApp.dir/OCP/OCP.cpp.o
> [ 85%] Building CXX object src/CMakeFiles/bocopApp.dir/tools/tools.cpp.o
> [ 89%] Building CXX object src/CMakeFiles/bocopApp.dir/tools/tools_interpolation.cpp.o
> [ 92%] Building CXX object src/CMakeFiles/bocopApp.dir/Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/problem.cpp.o
> [ 96%] Building CXX object src/CMakeFiles/bocopApp.dir/main.cpp.o
> [100%] Linking CXX executable /Users/ocots/Boulot/recherche/Logiciels/dev/ct/gallery/examples/regulator/bocopApp
> [100%] Built target bocopApp
[DONE] > make
Done
[5]:
0
We finally solve the problem by launching the optimization.
[6]:
bocop.run(problem_path)
Done
Solution analysis¶
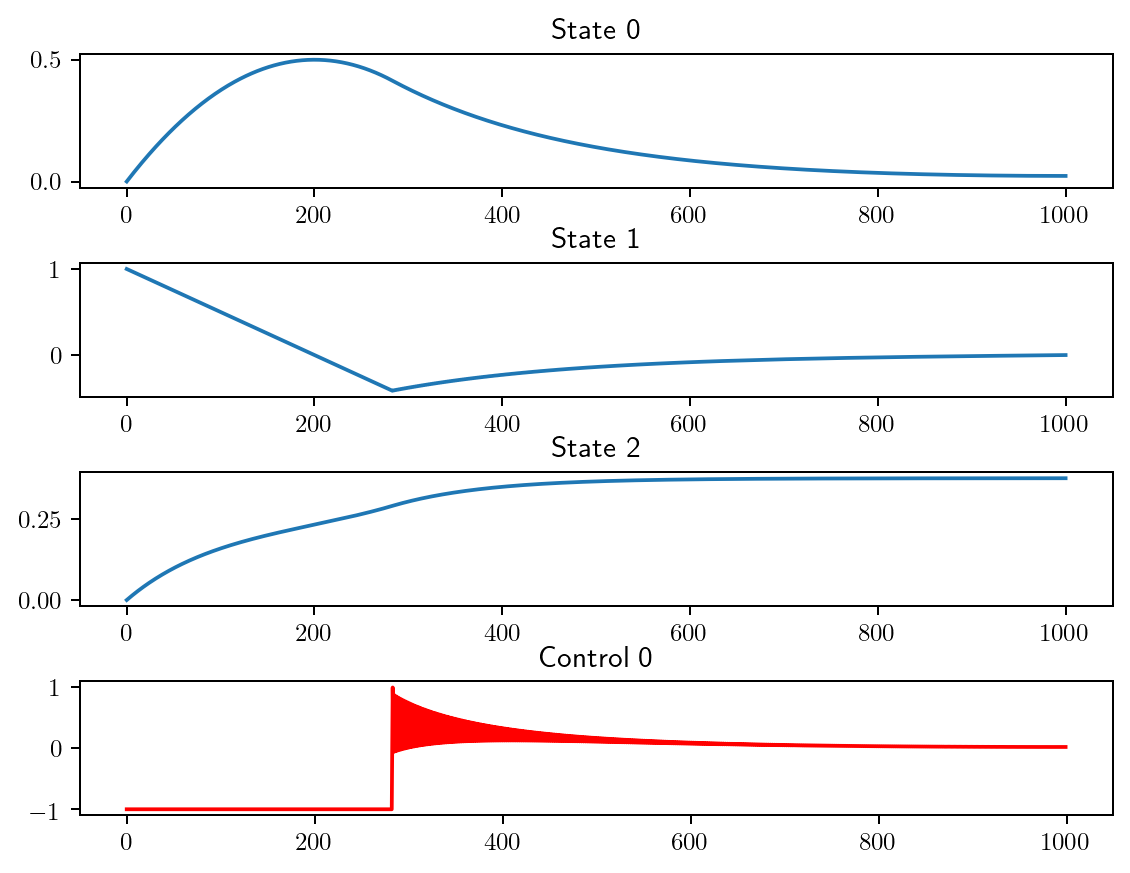
In addition to the state and control from the optimal trajectory, we can plot the Lagrange multipliers associated to the constraints for the discretized dynamics, that correspond to the costate variables from Pontrjagin Maximum Principle. Note that for the case of basic initial conditions \(x_i(0)=x_i^0\), the multipliers for these constraints will also match the costate variables at the initial time for the corresponding state variables. For this problem the third costate is constant and equal to \(-1\), which is normal since the third state corresponds to the integral cost to be minimized. The solution exhibits a bang-singular structure, as can be clearly seen from the followin figure on the control variable in purple. The oscillations of the control over the singular arc are often encountered when using discrete transcription, however the averaged control usually corresponds to the correct singular control, meaning that the state dynamics should be close to the optimal trajectory.
[7]:
# BOCOP solution
bocop_solution = bocop.readSolution(problem_path + "/problem.sol")
bocop_p0 = bocop_solution.costate[0:bocop_solution.dim_state,0]
Loading solution: ./problem.sol
[8]:
# Plot BOCOP solution
tspan = bocop_solution.time_steps
x1 = bocop_solution.state[0]
x2 = bocop_solution.state[1]
p10 = bocop_p0[0]; p1 = np.concatenate(([p10], bocop_solution.costate[0]))
p20 = bocop_p0[1]; p2 = np.concatenate(([p20], bocop_solution.costate[1]))
u = bocop_solution.control[0]; u = np.concatenate((u, [u[-1]]));
#s = H1(tspan, [x1, x2], [p1, p2])
fig = plt.figure(dpi=150);
fig.set_figwidth(5);
ax = plt.subplot(1,1,1);
ax.axvline(t0, color='k', linestyle='--', linewidth=0.5);
ax.axvline(tf, color='k', linestyle='--', linewidth=0.5);
ax.axhline( 0, color='k', linestyle='--', linewidth=0.5);
ax.axhline(-1, color='k', linestyle='--', linewidth=0.5);
l1, = plt.plot(tspan, x1)
l2, = plt.plot(tspan, x2)
l3, = plt.plot(tspan, p1, linestyle='--')
l4, = plt.plot(tspan, p2, linestyle='--')
l5, = plt.plot(tspan, u, linestyle='--')
ax.legend([l1, l2, l3, l4, l5], ['$x_1$', '$x_2$', '$p_1$', '$p_2$', '$u$'], loc='upper right', bbox_to_anchor=(0.94, 1))
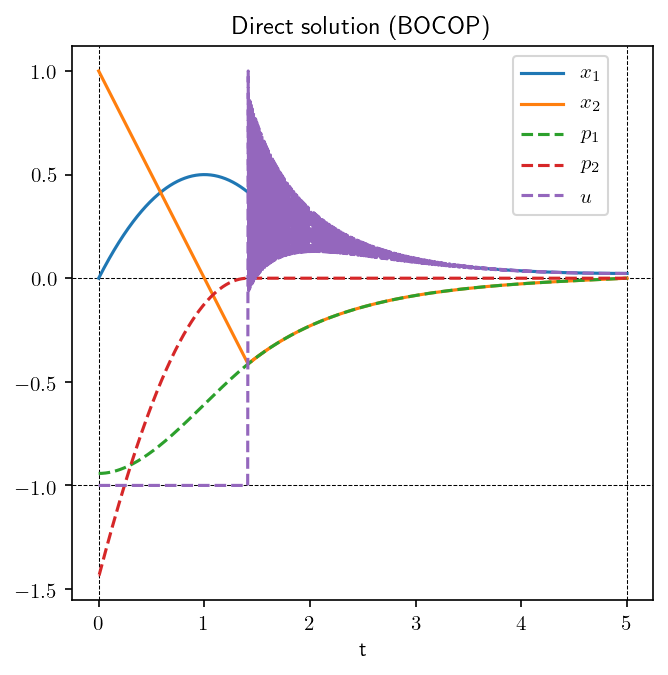
ax.set_xlabel('t');
ax.set_title('Direct solution (BOCOP)');
#plt.savefig("regulator_direct.eps", dpi=150)
[9]:
# Verbose
print("Bocop returns status {} with objective {:2.4g} and constraint violation {:2.4g}".format(bocop_solution.status,
bocop_solution.objective,
bocop_solution.constraints))
print("Costate at first time stage (t0+h/2): ", bocop_p0)
print("Multipliers for initial conditions: ", bocop_solution.boundarycond_multipliers[0:bocop_solution.dim_state])
Bocop returns status 0 with objective 0.377 and constraint violation 1.221e-12
Costate at first time stage (t0+h/2): [-0.94215546 -1.43220296 -1. ]
Multipliers for initial conditions: [-0.94216793 -1.44190126 -1. ]
Indirect method¶
Using the information gathered on the solution from the direct method, we can now solve the problem accurately with an indirect method, with the knowledge of both the optimal control structure and an estimate of the junction time and state-costate values at these times. We use the package nutopy for the indirect shooting method. Applying Pontrjagin maximum principle, one has to consider the following Hamiltonian (in normal form since there are no terminal constraints):
One checks that the control is either bang (equal to \(\pm 1\)) or singular. Singular arcs are actually of order one, given by the condition \(p_2=0\) (singular arcs actually leave on the codimension two submanifold \(\{p_2=x_2-p_1=0\}\) of the cotangent bundle \(T\mathbf{R^2} \simeq \mathbf{R}^2\times\mathbf{R}^2\), and the singular control (in feedback form) is \(u=x_1\). So we have a competition between three Hamiltonian flows, respectively associate with
We define these three Hamiltonians and the corresponding flows in order to set up our shooting algorithm. (For this particular example, in view of the BOCOP run, we restrict to just \(-1\) bang arcs.)
[10]:
# ------------
# Running cost
def df0fun(t, x, dx, u, du):
df0 = x[0]*dx[0] + x[1]*dx[1]
return df0
def d2f0fun(t, x, dx, d2x, u, du, d2u):
d2f0 = dx[0]*d2x[0] + dx[1]*d2x[1]
return d2f0
@nt.tools.tensorize(df0fun, d2f0fun, tvars=(2, 3))
def f0fun(t, x, u):
f0 = 0.5 * (x[0]**2 + x[1]**2)
return f0
# --------
# Dynamics
def dffun(t, x, dx, u, du):
df = np.zeros(2)
df[0] = dx[1]
df[1] = du
return df
def d2ffun(t, x, dx, d2x, u, du, d2u):
d2f = np.zeros(2)
return d2f
@nt.tools.tensorize(dffun, d2ffun, tvars=(2, 3))
def ffun(t, x, u):
f = np.zeros(2)
f[0] = x[1]
f[1] = u
return f
# ---
# OCP
o = nt.ocp.OCP(f0fun, ffun)
[11]:
# ------------
# Bang control
def dubang(t, x, dx, p, dp):
return 0.
def d2ubang(t, x, dx, d2x, p, dp, d2p):
return 0.
@nt.tools.vectorize(vvars=(1, 2, 3))
@nt.tools.tensorize(dubang, d2ubang, tvars=(2, 3))
def ubang(t, x, p):
u = -1.
return u
# ----------------
# Singular control
def dusing(t, x, dx, p, dp):
return dx[0]
def d2using(t, x, dx, d2x, p, dp, d2p):
return d2x[0]
@nt.tools.vectorize(vvars=(1, 2, 3))
@nt.tools.tensorize(dusing, d2using, tvars=(2, 3))
def using(t, x, p):
return x[0]
# ----------------------
# Hamiltonians and Flows
hbang = nt.ocp.Hamiltonian.fromOCP(o, ubang)
hsing = nt.ocp.Hamiltonian.fromOCP(o, using)
fbang = nt.ocp.Flow(hbang)
fsing = nt.ocp.Flow(hsing)
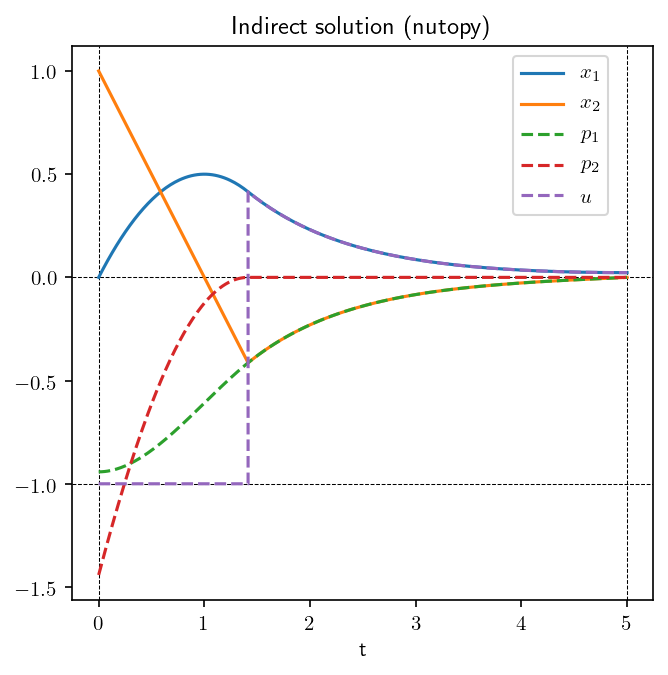
Assuming a bang-singular structure, it is then easy to define a shooting function whose unknowns are the value \(p_0\) of the costate at initial time, \((x_1,p_1)\) the state and costate values at the junction point between the (\(-1\)) bang arc and the singular one, and the time \(t_1\) where this junction occurs. A standard solver, properly initialised thanks to the previous solution provided by BOCOP, is eventually called to solve the problem. As is clear from the obtained numerical results, a very precise solution is computed.
[12]:
# -----------------------------------
# Derivative of the shooting function
def dshoot(z, dz):
# parse unknown z = (p0,t1,x1,p1)
p0, dp0 = z[0:2], dz[0:2]
t1, dt1 = z[2], dz[2]
x1_in, dx1_in = z[3:5], dz[3:5]
p1_in, dp1_in = z[5:7], dz[5:7]
s, ds = np.ones(7), np.ones(7)
# first bang arc
(x1, dx1), (p1, dp1) = fbang(t0, x0, (p0,dp0), (t1,dt1))
s[3:5], ds[3:5] = x1 - x1_in, dx1 - dx1_in
s[5:7], ds[5:7] = p1 - p1_in, dp1 - dp1_in
# singular arc
(xf, dxf), (pf, dpf) = fsing((t1,dt1), (x1_in,dx1_in), (p1_in,dp1_in), tf)
s[0], ds[0] = p1[1], dp1[1]
s[1], ds[1] = x1[1] - p1[0], dx1[1] - dp1[0]
s[2], ds[2] = pf[0], dpf[0]
return s, ds
# -----------------
# Shooting function
@nt.tools.tensorize(dshoot, full=True)
def shoot(z):
# parse unknown z = (p0,t1,x1,p1)
p0 = z[0:2]
t1 = z[2]
x1_in = z[3:5]
p1_in = z[5:7]
s = np.ones(7)
# first bang arc
x1, p1 = fbang(t0, x0, p0, t1)
s[3:5] = x1 - x1_in # matching conditions
s[5:7] = p1 - p1_in # matching conditions
# singular arc
xf, pf = fsing(t1, x1_in, p1_in, tf)
s[0] = p1[1] # p2(t1)
s[1] = x1[1] - p1[0] # x2(t1)-p1(t1)
s[2] = pf[0] # p1(tf)
return s
[13]:
# ------------------------------
# Find zero of shooting function
z0 = np.array([bocop_p0[0], bocop_p0[1], 1.4, 0.3, -0.4, -0.6, 0])
nleopt = nt.nle.Options(SolverMethod='hybrj', TolX=1e-8)
sol = nt.nle.solve(shoot, z0, df=shoot, options=nleopt)
z_sol = sol.x
print("Norm of the shooting function: ", np.linalg.norm(shoot(z_sol)))
Calls |f(x)| |x|
1 5.506349975841379e+00 2.347096552484115e+00
2 9.515986448835065e-02 2.351376407081736e+00
3 2.763674924589690e-02 2.337764011312881e+00
4 1.483945829887381e-04 2.340877879705303e+00
5 3.946895003995284e-06 2.340866282995954e+00
6 1.048435990418442e-07 2.340865847032248e+00
7 1.237808124694713e-10 2.340865858484743e+00
8 5.400314267047623e-16 2.340865858471237e+00
Results of the nle solver method:
xsol = [-9.42173346e-01 -1.44191018e+00 1.41376409e+00 4.14399640e-01
-4.13764088e-01 -4.13764088e-01 -1.26506733e-28]
f(xsol) = [-2.22044605e-16 3.33066907e-16 1.31838984e-16 5.55111512e-17
1.11022302e-16 -2.22044605e-16 -2.22044605e-16]
nfev = 8
njev = 1
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
Norm of the shooting function: 5.400314267047623e-16
[14]:
# -------------
# Plot solution
p0_sol = z_sol[0:2]
t1_sol = z_sol[2]
x1_sol = z_sol[3:5]
p1_sol = z_sol[5:7]
N = 100
tspan1 = list(np.linspace(t0, t1_sol, N+1))
x1, p1 = fbang(t0, x0, p0_sol, tspan1)
u1 = ubang(tspan1, x1, p1)
x1 = np.array(x1)
p1 = np.array(p1)
tspan2 = list(np.linspace(t1_sol, tf, N+1))
x2, p2 = fsing(t1_sol, x1_sol, p1_sol, tspan2)
u2 = using(tspan2, x2, p2)
x2 = np.array(x2)
p2 = np.array(p2)
fig = plt.figure(dpi=150);
fig.set_figwidth(5);
ax = plt.subplot(1,1,1);
ax.axvline(t0, color='k', linestyle='--', linewidth=0.5);
ax.axvline(tf, color='k', linestyle='--', linewidth=0.5);
ax.axhline( 0, color='k', linestyle='--', linewidth=0.5);
ax.axhline(-1, color='k', linestyle='--', linewidth=0.5);
l1, = plt.plot(np.concatenate((tspan1, tspan2)), np.concatenate((x1[:, 0], x2[:, 0])))
l2, = plt.plot(np.concatenate((tspan1, tspan2)), np.concatenate((x1[:, 1], x2[:, 1])))
l3, = plt.plot(np.concatenate((tspan1, tspan2)), np.concatenate((p1[:, 0], p2[:, 0])), linestyle='--')
l4, = plt.plot(np.concatenate((tspan1, tspan2)), np.concatenate((p1[:, 1], p2[:, 1])), linestyle='--')
l5, = plt.plot(np.concatenate((tspan1, tspan2)), np.concatenate((u1, u2)), linestyle='--')
ax.legend([l1, l2, l3, l4, l5], ['$x_1$', '$x_2$', '$p_1$', '$p_2$', '$u$'], loc='upper right', bbox_to_anchor=(0.94, 1))
ax.set_xlabel('t');
ax.set_title('Indirect solution (nutopy)');
#plt.savefig("regulator_indirect.eps", dpi=150)
{kind=link}