Notebook source code:
examples/shooting_tutorials/simple_shooting_general.ipynb
Run the notebook yourself on binder
![]()
The indirect simple shooting method¶
Author: Olivier Cots
Date: March 2021
Abstract
We present in this notebook the indirect simple shooting method based on the Pontryagin Maximum Principle (PMP) to solve a smooth optimal control problem. By smooth, we mean that the maximization condition of the PMP gives a control law in feedback form (i.e. with respect to the state and the costate) at least continuously differentiable.
We use the nutopy package to solve the optimal control problem by simple shooting. You can find another smooth example with more details about the use of nutopy at this page: note that in this example, the nutopy package is interoperated with the bocop software, implementing a direct collocation method.
Goal
The goal of this presentation is that at the end, you will be able to implement an indirect simple shooting method with nutopy package on an academic optimal control problem for which the optimal control (that is the solution of the problem) is smooth. We assume you have some basic knowledge on optimal control theory.
Contents
Statement of the optimal control problem and necessary conditions of optimality
Definition of the optimal control problem
Application of the Pontryagin Maximum Principle
The hidden true Hamiltonian
Examples and boundary value problems
Simple 1D example
An energy min navigation problem
Indirect simple shooting
The boundary value problem
The shooting equation
The indirect simple shooting method
Numerical resolution of the shooting equations with the nutopy package
Simple 1D example
Calculus of variations
An energy min navigation problem - exercice
{kind=link}
I) Statement of the optimal control problem and necessary conditions of optimality¶
a) Definition of the optimal control problem¶
We consider the following smooth (all the data are at least \(C^1\)) Optimal Control Problem (OCP) in Lagrange form, with fixed initial condition and final time:
with \(U \subset \mathrm{R}^m\) an arbitrary control set and with \(c\) a smooth application such that its Jacobian \(c'(x)\) (or \(J_c(x)\)) is of full rank for any \(x\) satisfying the constraint \(c(x)=0\). The solution \(u\) belongs to the set of control laws \(L^\infty([0, t_f], \mathrm{R}^m)\).
b) Application of the Pontryagin Maximum Principle¶
Let us denote by
the pseudo-Hamiltonian (that is the non-maximized Hamiltonian) associated to the optimal control problem.
According to the Pontryagin Maximum Principle (PMP), if \(u\) is solution of the problem (with \(x\) the associated trajectory), then there exists a covector \(p\) (which is absolutely continuous), a scalar \(p^0 \in \{-1, 0\}\), a Lagrange multiplier \(\lambda\), such that:
\((p, p^0) \ne (0,0)\),
\(\displaystyle \dot{x}(t) = \nabla_p H(x(t),p(t),u(t))\), \(\displaystyle \dot{p}(t) = -\nabla_x H(x(t),p(t),u(t))\), a.e on \([0, t_f]\),
\(\displaystyle H(x(t),p(t),u(t)) = \max_{w \in U} H(x(t), p(t), w)\) a.e on \([0, t_f]\) (maximization condition),
\(\displaystyle p(t_f) = J_c^T(x(t_f)) \lambda = \sum_{i=1}^k \lambda_i \nabla c_i(x(t_f))\) (transversality condition).
Assumptions
We assume the following:
\(U = \mathrm{R}^m\),
\(\forall (x,p) \in \mathrm{R}^n \times \mathrm{R}^n\), \(u \mapsto H(x,p,u)\) has a unique maximum denoted \(\varphi(x,p)\) (or \(u[x,p]\) to recall the fact that it is the control law in feedback form),
\(\varphi\) is smooth, that is at least \(C^1\).
Under these assumptions, the maximization condition (3) is equivalent to the first order necessary condition of optimality and we have:
II) Examples and boundary value problems¶
a) Simple 1D example¶
Remark: The interest of this example is to present the methodology to solve the conditions given by the Pontryagin maximum principle.
Step 1: Definition of the optimal control problem¶
We consider the optimal control problem:
with \(t_f := 1\), \(x_0 := -1\), \(x_f := 0\) and \(\forall\, t \in[0, t_f]\), \(x(t) \in \mathrm{R}\).
Step 2: Application of the Pontryagin maximum principle¶
The pseudo-Hamiltonian reads
The PMP gives
where \([t] := (x(t),p(t),u(t))\). If \(p^0 = 0\), then \(p = 0\) by the third equation and so \((p, p^0) = (0,0)\) which is not. Hence, any extremal \((x, p, p^0, u)\) given by the PMP is said to be normal, that is \(p^0 = -1\) (an extremal is said abnormal when \(p^0=0\)).
Remark: We do not consider the transversality condition when the target \(x_f\) is fixed. We can retrieve simply the Lagrange multiplier by the relation \(p(t_f)=\lambda\).
Remark: The maximization condition,
is equivalent here to the condition \(\nabla_u H[t] = 0\) by concavity.
Solving \(\nabla_u H[t] = 0\), the control satisfies \(u(t) = u[x(t), p(t)] := p(t)\) where we have introduced the smooth function on \(\mathrm{R} \times \mathrm{R}\):
Remark: Plugging the control law in feedback form into the pseudo-Hamiltonian gives the (maximized) Hamiltonian:
Step 3: Transcription to a boundary value problem¶
Now we have the control in feedback form, we introduce the following smooth Two-Points Boundary Value Problem (TPBVP or BVP for short):
The unknown of this BVP is the initial covector \(p(0)\). Indeed, fixing \(p_0:=p(0)\), then according to the Cauchy-Lipschitz theorem, there exists a unique maximal solution denoted
satisfying the dynamics \(\dot{z}(t) = (-x(t)+p(t), p(t))\) together with the initial condition \(z(0) = (x_0, p_0)\).
Goal
The goal is thus to find the right initial covector \(p_0\) such that \(x(t_f, x_0, p_0) = x_f\).
Step 4: Solving the shooting equation¶
From \(\dot{p}(t) = p(t)\), we get
which leads to
Solving \(x(t_f, x_0, p_0) = x_f\), we obtain
Remark: To compute \(p^*_0\), we have solved the linear shooting equation
with \(\pi_x(x,p) := x\). Solving \(S(p_0) = 0\) is what we call the indirect simple shooting method.
Summary
Note that thanks to the PMP, we have replaced the research of u (which is a function of time) by the research of an element of \(\mathrm{R}\): the covector \(p_0\). The prize of such a drastic reduction is to work in the cotangent space, that is the trajectory \(x\) is lifted in a bigger space and adjoined with a covector \(p\): this makes the simple shooting method to be qualified of indirect. It is important to note that in the indirect methods we work with \(z=(x,p)\) and not only with the trajectory \(x\).
III) Indirect simple shooting¶
a) The boundary value problem¶
Under our assumptions and thanks to the PMP we have to solve the following boundary value problem with a parameter \(\lambda\):
with \(z=(x,p)\), with \(u[z]\) the smooth control law in feedback form given by the maximization condition, and where \(\vec{H}(z, u) := (\nabla_p H(z,u), -\nabla_x H(z,u))\).
Remark. We can replace \(\dot{z}(t) = \vec{H}(z(t),u[z(t)])\) by \(\dot{z}(t) = \vec{h}(z(t))\), where \(h(z) = H(z, u[z])\) is the maximized Hamiltonian.
b) The shooting equation¶
To solve the BVP, we define a set of nonlinear equations, the so-called the shooting equations. To do so, we introduce the shooting function \(S \colon \mathrm{R}^n \times \mathrm{R}^k \to \mathrm{R}^k \times \mathrm{R}^n\):
where \(\pi_x(x,p) := x\) is the canonical projection into the state space, \(\pi_p(x,p) := p\) is the canonical projection into the co-state space, and where \(z(t_f, x_0, p_0)\) is the solution at time \(t_f\) of \(\dot{z}(t) = \vec{H}(z(t), u[z(t)]) = \vec{h}(z(t))\), \(z(0) = (x_0, p_0)\).
c) The indirect simple shooting method¶
Indirect simple shooting method
Solving the BVP is equivalent to find a zero of the shooting function, that is to solve
The indirect simple shooting method consists in solving this equation.
In order to solve the shooting equations, we need to compute the control law \(u[\cdot]\), the Hamiltonian system \(\vec{H}\) (or \(\vec{h}\)), we need an integrator method to compute the exponential map \(\exp(t \vec{H})\) defined by
and we need a Newton-like solver to solve \(S=0\).
Remark: The notation with the exponential mapping is introduced because it is more explicit and permits to show that we need to define the Hamiltonian system and we need to compute the exponential, in order to compute an extremal solution of the PMP.
Remark: It is important to understand that if \((p_0^*, \lambda^*)\) is solution of \(S=0\), then the control \(u(\cdot) := u[z(\cdot, x_0, p_0^*)]\) is a candidate as a solution of the optimal control problem. It is only a candidate and not a solution of the OCP since the PMP gives necessary conditions of optimality. We would have to go further to check whether the control is locally or globally optimal.

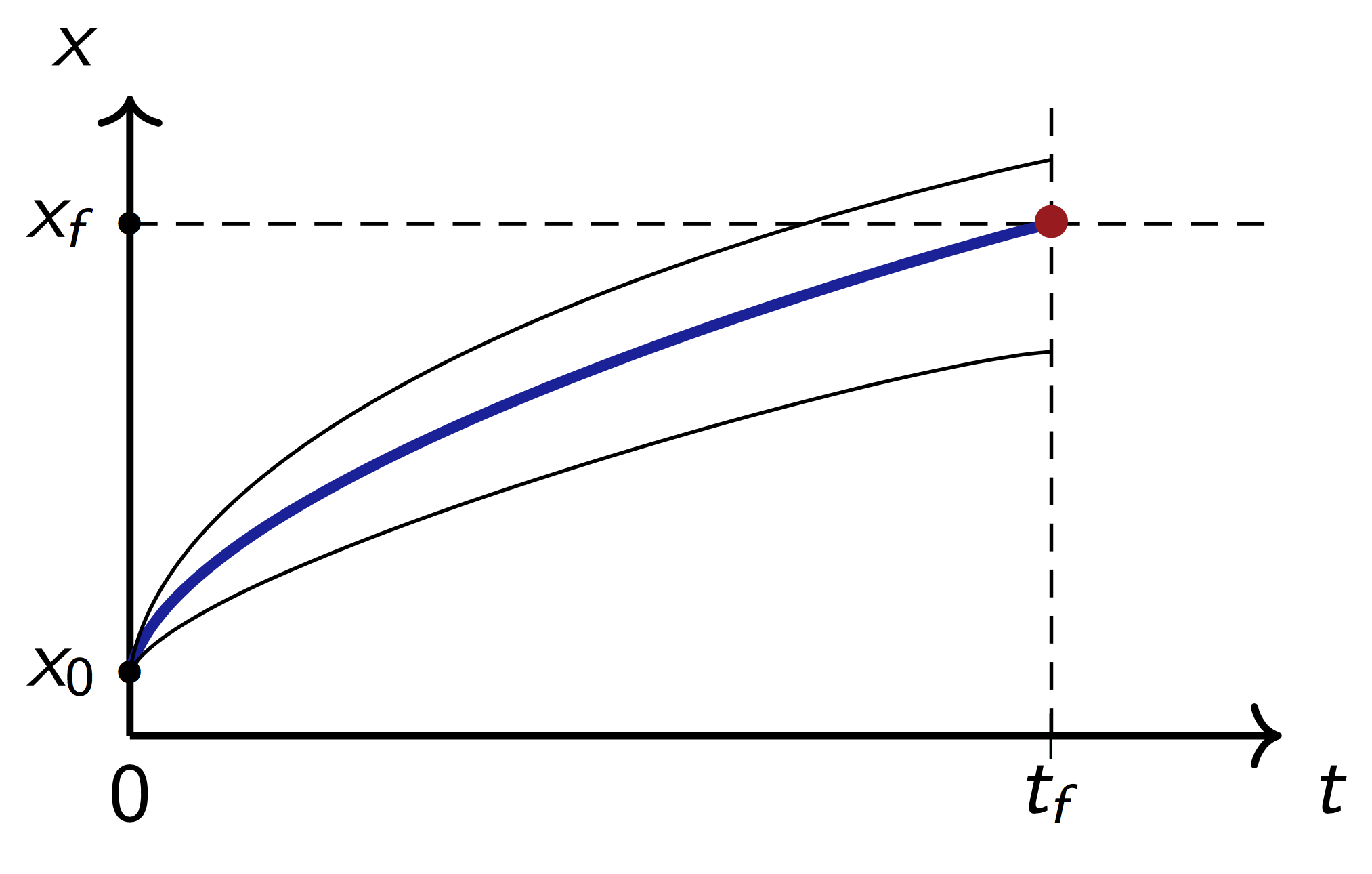
Figure: Illustration of the shooting method in the state-time space. The blue trajectory reaches the target in red. The shooting method consists in finding the right impulse to reach the target.

Figure: Illustration of the shooting method in the cotangent space. The blue extremal reaches the target in red.
IV) Numerical resolution of the shooting equations with the nutopy package¶
[1]:
# import nutopy and numpy packages
import nutopy as nt
import nutopy.tools as tools
import nutopy.ocp as ocp
import numpy as np
a) Simple 1D example¶
We recall the ocp:
with \(t_f := 1\), \(x_0 := -1\), \(x_f := 0\) and \(\forall\, t \in[0, t_f]\), \(x(t) \in \mathrm{R}\).
The (maximized) Hamiltonian is
and the Hamiltonian system is given by
The shooting function is
The solution is \(p_0^* \approx 0.313\).
Version 1: Using nutopy from the Hamiltonian system¶
In this first version, we choose to solve the shooting equations following the steps described in Section III)-a). In the next version, we will use the nutopy package in a more natural way.
We need the following methods: nutopy.ivp.exp, nutopy.nle.solve.
[2]:
# Definition of the Hamiltonian system
def hv(x, p):
return np.array([-x + p, p])
# Definition of the exponential mapping
# The exp function computes the exponential of a system given in the first argument of the function
# The system has to be given in the form: f(t, z)
def exponential(t, hvfun, x0, p0):
sol = nt.ivp.exp( lambda t, z: hvfun(z[0], z[1]), # we work with z=(x,p): f(t, z) = hvfun(x, p)
t, # final time
0.0, # initial time
np.array([x0, p0]) ) # z0 = (x0, p0)
return sol.xf[0], sol.xf[1] # return z(t) = (x(t), p(t))
# Definition of the shooting equation
def shoot(p0):
tf = 1.0
x0 = -1.0
xf_target = 0.0
xf, pf = exponential(tf, hv, x0, p0)
return xf - xf_target # x(tf, x0, p0) - xf_target
# The shooting method: resolution of the shooting equation
p0_guess = 1.0 # initial guess for the Newton solver
sol = nt.nle.solve(shoot, p0_guess); # call to the Newton solver
p0_sol = sol.x
print('NLE outputs: ', '\n\n p0_sol =', p0_sol, '\n shoot =', shoot(p0_sol), '\n')
Calls |f(x)| |x|
1 8.073217526767197e-01 1.000000000000000e+00
2 1.428248003892962e-08 3.130352977215060e-01
3 6.938893903907228e-18 3.130352855682848e-01
4 6.938893903907228e-18 3.130352855682848e-01
5 1.428248013607414e-08 3.130352734150637e-01
6 6.938893903907228e-18 3.130352855682848e-01
Results of the nle solver method:
xsol = 0.3130352855682848
f(xsol) = -6.938893903907228e-18
nfev = 6
njev = 2
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
NLE outputs:
p0_sol = 0.3130352855682848
shoot = -6.938893903907228e-18
Version 2: Using nutopy from the Hamiltonian¶
In this version we use nutopy in a more natural way. See this page for a more detailed example of the use of nutopy.
We need the following methods: nutopy.ocp, nutopy.nle.solve.
[3]:
# Definition of the maximized Hamiltonian and its derivatives
# The derivatives may be computed by hand as here or by Automatic Differentiation for instance
def dhfun(t, x, dx, p, dp):
# dh = dh_x dx + dh_p dp
hd = -p*dx + (-x+p)*dp
return hd
def d2hfun(t, x, dx, d2x, p, dp, d2p):
# d2h = dh_xx dx d2x + dh_xp dp d2x + dh_px dx d2p + dh_pp dp d2p
hdd = -d2p*dx + (-d2x+d2p)*dp
return hdd
@tools.tensorize(dhfun, d2hfun, tvars=(2, 3))
def hfun(t, x, p):
h = p * (-x + p) - 0.5*p**2
return h
h = ocp.Hamiltonian(hfun) # The Hamiltonian object
f = ocp.Flow(h) # The flow associated to the Hamiltonian object is
# the exponential mapping with its derivative
# that can be used to define the Jacobian of the
# shooting function
# Definition of the shooting function
def shoot(p0):
t0 = 0.0
tf = 1.0
x0 = np.array([-1.0])
xf_target = np.array([ 0.0])
xf, pf = f(t0, x0, p0, tf) # We use the flow to get z(tf, x0, p0)
s = xf - xf_target # x(tf, x0, p0) - xf_target
return s
# The shooting method: resolution of the shooting equation
p0_guess = np.array([1.0])
sol = nt.nle.solve(shoot, p0_guess);
p0_sol = sol.x
print('NLE\t: ', '\n\n p0_sol =', p0_sol, '\n shoot =', shoot(p0_sol), '\n')
Calls |f(x)| |x|
1 8.073217526767197e-01 1.000000000000000e+00
2 1.428248003892962e-08 3.130352977215060e-01
3 6.938893903907228e-18 3.130352855682848e-01
4 6.938893903907228e-18 3.130352855682848e-01
5 1.428248013607414e-08 3.130352734150637e-01
6 6.938893903907228e-18 3.130352855682848e-01
Results of the nle solver method:
xsol = [0.31303529]
f(xsol) = [-6.9388939e-18]
nfev = 6
njev = 2
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
NLE :
p0_sol = [0.31303529]
shoot = [-6.9388939e-18]
[4]:
# We define the derivative of the shooting function and use it for the resolution of S=0.
# Previously, the Jacobian was computed by finite differences.
# We do not provide S'(p0) but S'(p0).dp0.
# In our scalar case, it is quite similar but in general, it simpler to provide S'(p0).dp0.
def dshoot(p0, dp0):
t0 = 0.0
tf = 1.0
x0 = np.array([-1.0])
(xf, dxf), _ = f(t0, x0, (p0, dp0), tf)
ds = dxf
return ds
shoot = nt.tools.tensorize(dshoot)(shoot) # the use of tensorize permits to code S'(p0).dp0 instead of S'(p0)
# The shooting method: resolution of the shooting equation
p0_guess = np.array([1.0])
sol = nt.nle.solve(shoot, p0_guess, df=shoot);
p0_sol = sol.x
print('NLE\t: ', '\n\n p0_sol =', p0_sol, '\n shoot =', shoot(p0_sol), '\n')
Calls |f(x)| |x|
1 8.073217526767197e-01 1.000000000000000e+00
2 3.184008612322486e-11 3.130352855411916e-01
3 1.110223024625157e-16 3.130352855682850e-01
Results of the nle solver method:
xsol = [0.31303529]
f(xsol) = [1.11022302e-16]
nfev = 3
njev = 1
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
NLE :
p0_sol = [0.31303529]
shoot = [1.11022302e-16]
b) Calculus of variations¶
Problem 1:
Les us consider the following problem which consists in computing the Euclidean distance between two points of the plan:
with \(t_f > 0\) fixed and \(A, B \in \mathrm{R}^2\) given.
The (maximized) Hamiltonian is
and the Hamiltonian system is given by
The shooting function is
[5]:
# Definition of the maximized Hamiltonian and its derivatives
def dhfun(t, x, dx, p, dp):
# dh = dh_x dx + dh_p dp
hd = np.dot(p, dp)
return hd
def d2hfun(t, x, dx, d2x, p, dp, d2p):
# d2h = dh_xx dx d2x + dh_xp dp d2x + dh_px dx d2p + dh_pp dp d2p
hdd = np.dot(d2p, dp)
return hdd
@tools.tensorize(dhfun, d2hfun, tvars=(2, 3))
def hfun(t, x, p):
h = 0.5*np.dot(p, p)
return h
h = ocp.Hamiltonian(hfun) # The Hamiltonian object
f = ocp.Flow(h) # The flow associated to the Hamiltonian object is
# the exponential mapping with its derivative
# that can be used to define the Jacobian of the
# shooting function
# Definition of the shooting function and its derivative
# the use of tensorize permits to code S'(p0).dp0 instead of S'(p0)
def dshoot(p0, dp0):
t0 = 0.0
tf = 1.0
A = np.array([ 0.0, 0.0])
(xf, dxf), _ = f(t0, A, (p0, dp0), tf)
ds = dxf
return ds
@tools.tensorize(dshoot)
def shoot(p0):
t0 = 0.0
tf = 1.0
A = np.array([ 0.0, 0.0])
B = np.array([ 1.0, 1.0])
xf, pf = f(t0, A, p0, tf) # We use the flow to get z(tf, x0, p0)
s = xf - B # x(tf, x0, p0) - B
return s
# The shooting method: resolution of the shooting equation
p0_guess = np.array([0.1, 0.1])
sol = nt.nle.solve(shoot, p0_guess, df=shoot);
p0_sol = sol.x
print('NLE\t: ', '\n\n p0_sol =', p0_sol, '\n shoot =', shoot(p0_sol), '\n')
Calls |f(x)| |x|
1 1.272792206135785e+00 1.414213562373095e-01
2 3.140184917367550e-16 1.414213562373095e+00
3 3.140184917367550e-16 1.414213562373095e+00
4 3.140184917367550e-16 1.414213562373095e+00
5 3.140184917367550e-16 1.414213562373095e+00
6 3.140184917367550e-16 1.414213562373095e+00
7 3.140184917367550e-16 1.414213562373095e+00
8 7.954951288348694e-02 1.493763075256582e+00
9 3.140184917367550e-16 1.414213562373095e+00
10 3.140184917367550e-16 1.414213562373095e+00
11 3.140184917367550e-16 1.414213562373095e+00
12 3.140184917367550e-16 1.414213562373095e+00
13 3.140184917367550e-16 1.414213562373095e+00
14 3.140184917367550e-16 1.414213562373095e+00
15 3.140184917367550e-16 1.414213562373095e+00
16 3.140184917367550e-16 1.414213562373095e+00
17 3.140184917367550e-16 1.414213562373095e+00
18 3.140184917367550e-16 1.414213562373095e+00
19 3.140184917367550e-16 1.414213562373095e+00
20 3.140184917367550e-16 1.414213562373095e+00
21 3.140184917367550e-16 1.414213562373095e+00
22 3.140184917367550e-16 1.414213562373095e+00
23 3.140184917367550e-16 1.414213562373095e+00
24 3.140184917367550e-16 1.414213562373095e+00
25 3.140184917367550e-16 1.414213562373095e+00
26 3.140184917367550e-16 1.414213562373095e+00
27 3.140184917367550e-16 1.414213562373095e+00
28 3.140184917367550e-16 1.414213562373095e+00
29 3.140184917367550e-16 1.414213562373095e+00
30 3.140184917367550e-16 1.414213562373095e+00
Results of the nle solver method:
xsol = [1. 1.]
f(xsol) = [2.22044605e-16 2.22044605e-16]
nfev = 30
njev = 2
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
NLE :
p0_sol = [1. 1.]
shoot = [2.22044605e-16 2.22044605e-16]
Problem 2:
Les us consider the following problem which consists in computing the Euclidean distance between a point and a line of the plan:
with \(t_f > 0\) fixed and \(A\in \mathrm{R}^2\) given.
The (maximized) Hamiltonian and the Hamiltonian system are similar to Problem 1. We have the transversality condition
In this case, the shooting function is given by
[6]:
# Definition of the maximized Hamiltonian and its derivatives
def dhfun(t, x, dx, p, dp):
# dh = dh_x dx + dh_p dp
hd = np.dot(p, dp)
return hd
def d2hfun(t, x, dx, d2x, p, dp, d2p):
# d2h = dh_xx dx d2x + dh_xp dp d2x + dh_px dx d2p + dh_pp dp d2p
hdd = np.dot(d2p, dp)
return hdd
@tools.tensorize(dhfun, d2hfun, tvars=(2, 3))
def hfun(t, x, p):
h = 0.5*(p[0]**2+p[1]**2)
return h
h = ocp.Hamiltonian(hfun) # The Hamiltonian object
f = ocp.Flow(h) # The flow associated to the Hamiltonian object is
# the exponential mapping with its derivative
# that can be used to define the Jacobian of the
# shooting function
# Definition of the shooting function and its derivative
# the use of tensorize permits to code S'(p0).dp0 instead of S'(p0)
def dshoot(y, dy):
p0 = y[0:2]
l = y[2]
dp0 = dy[0:2]
dl = dy[2]
t0 = 0.0
tf = 1.0
A = np.array([ 0.0, 0.0])
(xf, dxf), (pf, dpf) = f(t0, A, (p0, dp0), tf)
ds = np.zeros([3])
ds[0] = dxf[0]
ds[1] = dpf[0]
ds[2] = dpf[1]
return ds
@tools.tensorize(dshoot)
def shoot(y):
p0 = y[0:2]
l = y[2]
t0 = 0.0
tf = 1.0
A = np.array([ 0.0, 0.0])
xf, pf = f(t0, A, p0, tf)
s = np.zeros([3])
s[0] = xf[0] - 1.0
s[1] = pf[0] - l
s[2] = pf[1]
return s
# The shooting method: resolution of the shooting equation
y_guess = np.array([0.1, 0.1, 0.5])
sol = nt.nle.solve(shoot, y_guess, df=shoot);
y_sol = sol.x
print('NLE\t: ', '\n\n p0_sol =', y_sol[0:2], '\n lambda =', y_sol[2], '\n', '\n shoot =', shoot(y_sol), '\n')
Calls |f(x)| |x|
1 9.899494936611666e-01 5.196152422706632e-01
2 5.265754007445733e+01 5.341221252310977e+01
3 2.215058419779381e-02 1.398638437904777e+00
4 1.337306002566763e-04 1.414308127348630e+00
5 2.220446049250333e-16 1.414213562373095e+00
6 2.220446049250313e-16 1.414213562373095e+00
7 2.220446049250313e-16 1.414213562373095e+00
8 6.686530012833813e-05 1.414260844070578e+00
9 2.220446049250313e-16 1.414213562373095e+00
10 3.140184917367550e-16 1.414213562373095e+00
11 3.140184917367550e-16 1.414213562373095e+00
12 3.140184917367550e-16 1.414213562373095e+00
13 3.140184917367550e-16 1.414213562373095e+00
14 3.140184917367550e-16 1.414213562373095e+00
15 3.140184917367550e-16 1.414213562373095e+00
16 3.140184917367550e-16 1.414213562373095e+00
17 3.140184917367550e-16 1.414213562373095e+00
18 3.140184917367550e-16 1.414213562373095e+00
19 3.140184917367550e-16 1.414213562373095e+00
Results of the nle solver method:
xsol = [ 1.00000000e+00 -2.97001333e-23 1.00000000e+00]
f(xsol) = [-2.22044605e-16 0.00000000e+00 -2.97001333e-23]
nfev = 19
njev = 2
status = 1
success = True
Successfully completed: relative error between two consecutive iterates is at most TolX.
NLE :
p0_sol = [ 1.00000000e+00 -2.97001333e-23]
lambda = 1.0
shoot = [-2.22044605e-16 0.00000000e+00 -2.97001333e-23]